
汽车制造中多种焊接方法大总结
三、焊接缺陷及其控制方法
1.未熔合
主要是焊缝金属和母材之间或焊道金属和焊道金属之间未完全熔合的部分,即填充金属粘盖在母材上或者是填充金属层间而部分金属未熔合在一起。
防止措施:
稍减焊接速度,略增焊接电流,使热量增加到足以熔化母材或前一层焊缝金属;
焊条角度及运条应适当,要照顾到母材两侧温度及熔化情况;对由熔渣、脏物等所引起的未熔合,要加强清渣,将氧化皮等脏物清理干净;
注意分清熔渣和铁水,焊条有偏心时应调整角度使电弧处于正确方向;
气体保护焊尤宜控制焊接速度不要过高,电弧电压偏低,维持一定的弧长,保持射流过渡,而且优先应用氦混合气体作为保护气体;
半自动焊或埋弧自动焊场合,焊丝直接对准接头根部以确保根部焊透。
2.咬边
咬边是焊接过程中,电弧将焊缝边缘熔化后,没有得到填充金属的补充,在焊缝金属的焊趾区域或根部区域形成沟槽或凹陷。
防止措施:
选用合适电流,避免电流过大;
控制焊接速度,使其必须满足所熔敷的焊缝金属完全充填于母材所有已熔化的部分;
采用摆动工艺时,在坡口边缘运条稍慢些,焊条应做短时停顿,以使焊缝金属与邻接板料之间的温度相近,在坡口中间运条速度要快些,并使填充金属与基本金属混合均匀;
手工焊要控制焊条的位置,在角焊时,焊条要采用合适的角度和保持一定的电弧长度,保持运条均匀,既要保证完全熔化,又要使焊接熔池形成饱满的外形;
尽量采用短弧焊;
当有可能形成过量咬边时,应尽量避免在水平位置施焊角焊缝,而采用船形位置焊接;
过量的摆动也容易形成咬边,可采用多道焊工艺克服这一缺陷。
3.焊瘤
焊瘤是过量的焊缝金属流出基体金属熔化表面而未熔合,这种金属是由于熔池温度过高,使液体金属凝固较慢,在自重作用下下坠而形成。也就是在焊接过程中,熔化金属流淌到焊缝之外未熔化的母材上所形成的金属瘤。在角焊缝中产生的频度多于对接焊缝。
防止措施:
正确选择工艺参数,间隙不宜过大,选用较平焊小10%~15%的焊接电流,严格控制熔池温度,防止过高;
选用小直径焊条施焊,焊条左右摆动中间快些,两侧稍慢些,在边缘有稍停留的稳弧动作时间;
在对接焊第一层时,要注意熔池温度,密切观察熔池形状。如发现开始有下坠迹象应立即灭弧,让熔池温度稍微下降,再引弧焊接;
选择合适的焊条倾角,使用碱性焊条时宜采用短弧焊接,运条速度要均匀。
4.弧坑
弧坑是由于断弧或收弧不当,在焊缝末端形成的凹陷,而后续焊道焊接之前或在后续焊道焊接过程中未被消除,弧坑通常出现在焊缝尾部或接头处,弧坑不仅削弱焊缝截面,而且由于冷速较高,杂质易于集聚,而伴随产生气孔、夹渣、裂纹等缺陷。
防止措施:
正确地选择焊接电流;
采用断续灭弧法或用收弧板,将弧坑引至焊件外面;
手工电弧焊在收弧过程中焊条在收尾处作短时间停留或作几次环形运条,使足够的焊条金属填满熔池;
在埋弧自动焊时,分两步按下“停止”按扭,目的是为了填满弧坑。
5.凹坑
焊后在焊缝表面或背面形成低于母材表面的局部低洼部分叫凹坑,焊缝背面的凹坑通常又叫内凹。
防止措施:
压短弧长、调整焊条倾角和适当减少装配间隙;
焊条在收尾处稍多停留一会,为避免因停留时间过长,导致熔池温度过高,而造成熔池过大或焊瘤,应采用几次断续灭弧来填满,即在该处稍停留后就灭弧,待其稍冷后再引弧,并填充一些熔化金属,这样几次便可将凹坑填满。但碱性直流焊条不宜采用断续灭弧法,否则易产生气孔。
6.未焊透
未焊透是指基本金属之间,或者基本金属与熔敷金属之间的局部未熔合现象,它和未熔合有些相似,有时很难区别。
防止措施:
正确选择坡口型式和装配间隙,注意坡口两侧及焊层之间的清理;
正确选择焊接电流的大小;
随时调整运条中焊接的角度,使熔化金属之间及熔化金属与基本金属之间充分熔合;
7.烧穿
焊接过程中,熔化金属自坡口背面流出,形成穿孔的缺陷。
防止措施:
减小焊接电流,适当增加焊接速度;
严格控制焊件间隙,并保证这种间隙在整个焊缝长度上的一致性。
四、汽车焊接新技术和新方向
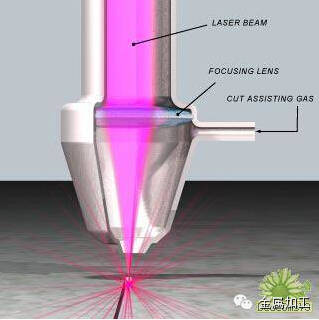
激光焊接技术

激光焊是以聚焦的激光束作为能源轰击焊件所产生的热量进行焊接的一种高效精密的焊接方法。,焊接过程属热传导型,即激光辐射加热工件表面,表面热量通过热传导向内部扩散,通过控制激光脉冲的宽度、能量、峰值功率和重复频率等参数,使工件熔化,形成特定的熔池。由于其独特的优点,已成功应用于微、小型零件的精密焊接中。
激光焊接的特点是被焊接工件变形极小,几乎没有连接间隙,焊接深度/宽度比高,因此焊接质量比传统焊接方法高。汽车工业中,激光技术主要用于车身拼焊、焊接和零件焊接。
塑料焊接技术
超声波塑焊是将高频率机械振动通过工件传到接口部分,使分子加速运动。分子摩擦转换成热量使接口处塑料溶化,从而使两个焊件以分子联接方式真正结合为一体。因为这种分子运动是在瞬间完成的,所以绝大部分的超声波塑焊可以0.25~0.5s内完成。
Branson塑料焊接技术已被成功地运用于汽车保修杠、仪表板和仪表盘、刹车显示灯、方向指示器、汽车门板以及其他与发动机有关的零部件制造工业中。近年来,原先许多传统使用金属的零部件也开始用塑料代替,如进气管,仪表指针,散热器加固,油箱,过滤器等。
电阻焊的节能及控制技术
发展三相低频电阻焊机、三相次级整流接触焊机和IGBT逆变电阻焊机,可以解决电网不平衡和提高功率因数的问题,同时还可进一步节约电能,利于实现参数的微机控制,可更好地适用于焊接铝合金、不锈钢及其他难焊金属的焊接。另外还可进一步减轻设备重量。
等离子焊(PAW)
等离子是指在标准大气压下温度超过3000℃的气体,在温度谱上可以把其看作为继固态、液态、气态之后的第四种物质状态。等离子弧焊是在钨极氩弧焊的基础上发展起来的一种焊接方法。等离子弧焊用的热源则是将自由钨弧压缩强化之后而获得电离度更高的电弧等离子体,称等离子弧,又称压缩电弧。
等离子的焊接工艺应用在油箱的两个半圆边缘的焊接。氩气保护的等离子焊接切割早已在各行业应用,主要用于合金钢和有色金属加工。发动机气阀体早已采用填充圈等离子焊接。近十几年来粉末等离子堆焊有很大发展,可进行小熔合比的薄层料精细堆焊,能堆焊各种特种合金表面。
TCP自动校零技术
TCP自动校零是用在机器人焊接中的一项新技术,它的硬件设施是由一梯形固定支座和一组激光传感器组成。当焊枪以不同姿态经过TCP支座时,激光传感器都将记录下的数据传递到CPU与最初设定值进行比较与计算。当TCP发生偏离时,机器人会自动运行校零程序,自动对每根轴的角度进行调整,并在最少的时间内恢复TCP零位。
目前在波罗后桥及帕萨特副车架的机器人焊接生产线上均采用了该技术,大大方便了设备调整,节约了调整时间,提高了产品的质量。
焊缝自动跟踪技术

焊缝自动跟踪技术为电弧电压跟踪传感,该系统具有寻找焊缝起始点、终点以及弧长参考点,焊接过程中根据弧长的变化,用电弧传感器控制电压自适应控制。这种方法也只能应用于角接接头形式,对于轿车底盘零件大量的薄板搭接焊缝,因无法寻找弧长参考点也无法应用。
机器人焊接

工业机器人,因集自动化生产和灵活性生产特点于一身,故轿车生产近年来大规模、迅速地使用了机器人。在焊接方面,主要使用的是点焊机器人和弧焊机器人。国内汽车焊接水平与国外相比差距很大,焊接的自动化已经引起国内汽车生产厂家的重视。
- 上一篇:铝焊接的注意事项 2014/12/22
- 下一篇:交流电焊机和直流电焊机的区别 2014/12/22